
teisipäev, 29. oktoober 2013
Mobiiliga roboti juhtimine
esmaspäev, 28. oktoober 2013
Ristkülikuülesanne
Ristkülikuülesanne: robot peab liikuma mööda ristkülikut, mille mõõdud on 80cm x 30cm. Rattad ei tohi joont puudutada!
Et teha korrektne programm siis kõigepealt kontrolli oma roboti 1 rattapöörde pikkust, mõõda see ära ja jäta meelde ka edaspidiseks. Seejärel arvuta mitu pööret peab mootor tegema.
Käivita robot käteplaksuga.
esmaspäev, 14. oktoober 2013
Kuristik
 Koosta robotile selline programm, et robot laual liikudes ei sõidaks üle laua ääre. Selleks lisa sonar ehk kauguseandur. Robot peaks aru saama, kui on jõudnud laua servale ning pöörduma sealt tagasi. Programm peaks töötama lõputult.
Koosta robotile selline programm, et robot laual liikudes ei sõidaks üle laua ääre. Selleks lisa sonar ehk kauguseandur. Robot peaks aru saama, kui on jõudnud laua servale ning pöörduma sealt tagasi. Programm peaks töötama lõputult.pühapäev, 13. oktoober 2013
Garaaži sisenemine
Vajalikud andurid: mikrofon ja puuteandur.

 Robot liigub sirgjooneliselt, heli (nt käteplaksu) peale keerab paremale ja siseneb garaaži, kui puudutab garaaži tagaseina siis peatub ja mängib heli.
Robot liigub sirgjooneliselt, heli (nt käteplaksu) peale keerab paremale ja siseneb garaaži, kui puudutab garaaži tagaseina siis peatub ja mängib heli.
esmaspäev, 7. oktoober 2013
Neljas ülesanne: explorer sonari ja puuteanduriga
Programmeerida robot kasutama sonarit ja puuteandurit nii et üks kontrollib ühes suunas ja teine teises suunas. Robot liigub lõputult.
Kolmas ülesanne: silmadega explorer
Lisa oma robotile sonar ehk kauguseandur - see võimaldab mõõta kaugust objektidest (kuni 2,5m). Kokkupaneku juhised on komplektisoleva juhendi lk 28. 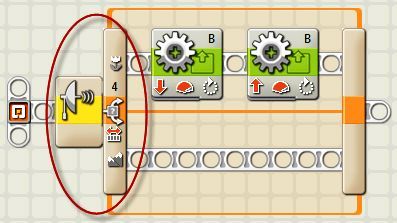{kind=link}
Ülesanne:
programmeerida robot nii, et kasutatakse sonarit. Robot peab liikuma iseseisvalt lõputult ning "põrkama" 30cm enne takistust. Takistust kohates peab robot keerama 90 kraadi ja liikuma edasi uues suunas.
Tellimine:
Kommentaarid (Atom)