 Lisa oma robotile sonar ehk kauguseandur - see võimaldab mõõta kaugust objektidest (kuni 2,5m). Kokkupaneku juhised on komplektisoleva juhendi lk 28.
Lisa oma robotile sonar ehk kauguseandur - see võimaldab mõõta kaugust objektidest (kuni 2,5m). Kokkupaneku juhised on komplektisoleva juhendi lk 28. 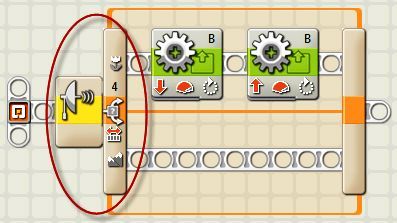{kind=link}
Ülesanne:
programmeerida robot nii, et kasutatakse sonarit. Robot peab liikuma iseseisvalt lõputult ning "põrkama" 30cm enne takistust. Takistust kohates peab robot keerama 90 kraadi ja liikuma edasi uues suunas.
Kommentaare ei ole:
Postita kommentaar